
Atlas
仿人机器人 之 Atlas
感谢徐浩益同学的整理和资料
- 设计公司:美国波士顿动力(Boston Dynamics)(现被软银收购……)
- 官方网站:Atlas Project
- 原型:Petman
公司简介
波士顿动力公司(英语:)是一家美国的工程与机器人设计公司,美国军方通过 DARPA (美国国防部先进研究项目局)资金支持了波士顿动力的许多项目。
Marc Raibert是该公司的总裁兼专案经理,他在1992年令此公司从麻省理工学院底下独立出来。
在2013年12月13日,波士顿动力公司被Google收购。有消息称2016年3月被Google出售给丰田研究所,实际上在2017年的6月,软银截胡丰田,收购了波士顿动力。
其开发的机器人包括LittleDog,RiSe,RHex,SandFlea ,LS3(Legged Squad Support Systems),Cheetah,BigDg,Petman,Atlas。其中Petman和Atlas为人型的机器人。

机器人简介
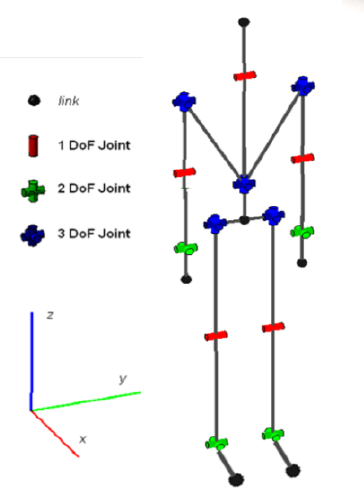
Atlas机器人是基于波士顿动力公司早期的Petman人型机器人。Atlas机器人由航空级铝和钛建造,它共有28个自由度,全部由液压驱动,可以实现位置闭环和力矩控制。自它发布至今有三个版本,第一版,身高约1.88m,质量150kg,肩宽0.76m。
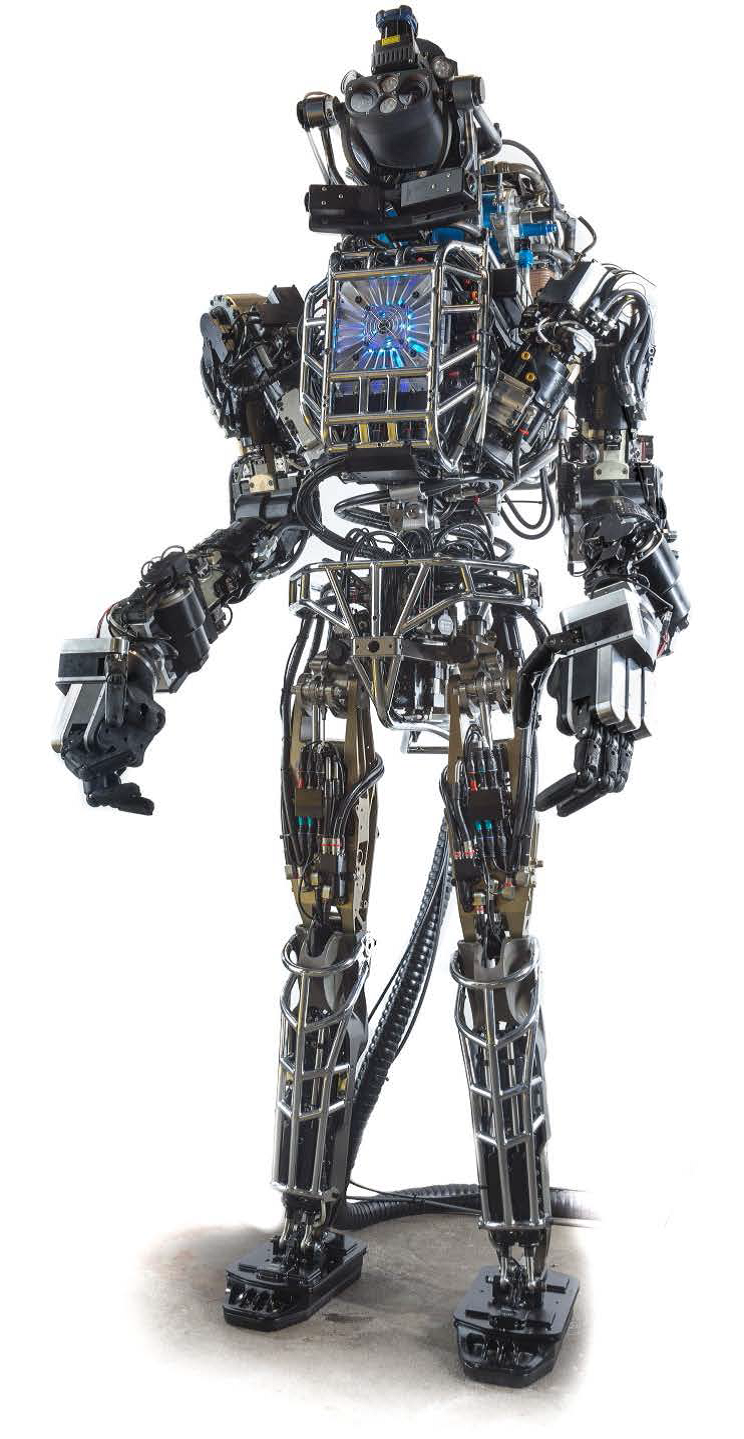
基本参数
- Degrees of Freedom: 28
- Weight: 150 kg
- Height: 1.88 m
- Shoulder Width: 0.76 m
头部
在头部集成了MultiSense SL ,此设备包含一个双目摄像头,一个北阳的激光雷达,可以满足仿人机器人的基本需求,且完美支持ROS,并且由于头部没有偏航的自由度,还在头部增加了2个广角的摄像头。
腰部
在腰部安装了一个IMU。
手部
在手臂有一个可换的末端执行器,官方提供3种末端执行器,并且支持第三方的手部安装。
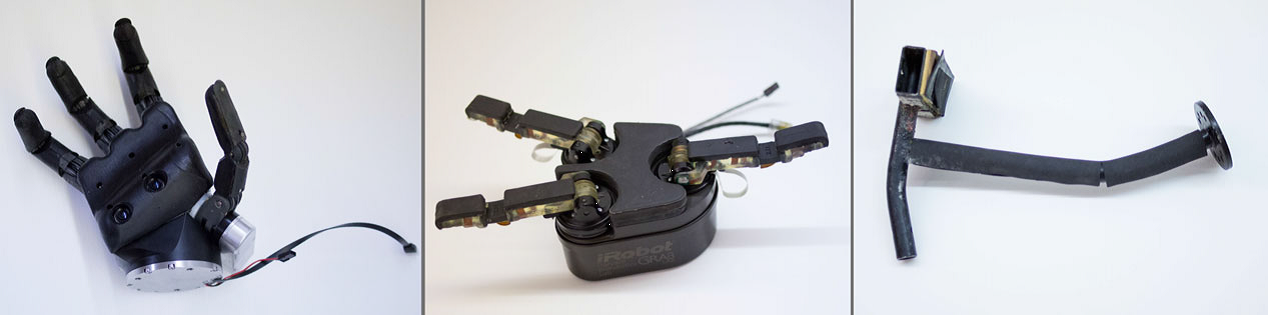
它的手具有精细动作技能的能力。
在这一版的机器人还需要外部供电,Atlas机器人可以在崎岖的地形行走,它能在传送带上大步前进,而且在平地的行走速度可以达到5.1km/h以上,而且可以躲开传送带上突然出现的木板,从高处跳下稳稳落地,两腿分开从陷阱两边走过,然后跑上楼梯;单腿站立,被从侧面而来的球重撞而不倒,等等。
其他改进
为了参加DARPA机器人挑战赛,在2015年1月12日,Atlas的机器人团队发布了新的改进版本。在这次改进中Atlas全身的百分之七十五都被重新设计了,只有小腿和脚沿用了上一版的设计。这次改进使用了新的更轻的材料和新的液压系统并加入了电池,总体的重量只增加到156.5kg。机器人最重要的变化是电源和液压系统,Atlas 携带一个3.7kwh的锂粒子电池组,可以保证一个小时的各种任务操作,包括步行,站立使用工具和其他动作。Atlas的这次升级在于提高了灵活性和效率,并包括:
- 在手腕增加了额外的自由度,可以使机器人旋转手腕来转动门把手。
- 增加了三个机载计算机用于感知和任务规划,而且在头部新加了无线路由器可以实现无阻塞通信。
- 在臀部,膝部和背部增加了强度。
- 无线紧急停止的安全操作。
- 使用了新的液压系统,噪声更少。
在2016年波士顿动力推出了新的Atlas机器人,和第二版的动力一样,Atlas采用电源供电和液压驱动。这版的Atlas高1.75米,重82kg,于上一代相比重量有了很大的减轻
在搬箱子、出门推门等过程中还需要标记点完成物体识别任务,对物体的识别等机器视觉能力有所提升。在这版中机器人摔倒以后可以快速地自主起身。在官方视频中,Atlas还演示了野外行走的效果。在自行打开门之后,可以在雪地中行走,虽然遇到了脚滑的现象,但自主的平衡控制力让机器人可以在雪地中爬起,继续保持行走的状态。
小结
Atlas可以说是液压控制人型机器人的巅峰,而且对比电机控制的机器人来说,各有优势。Atlas使用了液压控制可以输出更大的力矩,而且会有更优的效率。不过对于液压系统,每一个关节的执行反馈机构都需要专门设计,控制方面有了更大的难度。但是Atlas的团队克服了种种困难用液压实现了人型机器人的液压控制,并且做到了顶尖水平。
